概述
本文基于 DeepMind RL Research 领头人David Silver的Intro to RL教学视频和互联网上各大神的笔记统一整理,如有错误请斧正,谢谢!
为了一步步引入MDP,我们将循序渐进地从马尔科夫性质(Markov Process),马尔科夫奖励过程(Markov Reward Process,MRP),再到马尔科夫决策过程(Markov Decision Processes,MDP)。最后再对MDP进行部分扩展,如有限与连续MDPs(Infinite and continuous MDPs),部分观测MDP(Partially Observable MDPs,POMDP)以及无折扣或平均奖励MDPs(Undiscounted, average reward MDPs)。
1. 马尔科夫性质(Markov Property)
进一步了解马尔科夫决策过程之前,需要先了解马尔科夫性质(Markov Property),马尔科夫性质即未来的状态只依赖于当前状态,与过去状态无关。
正式的定义如下:
马尔科夫性质(Markov Property)定义:
在时间步时,环境的反馈仅取决于上一时间步 的状态 ,与时间步 以及 步之前的时间步都没有关联性。
马尔科夫性,也就是无后效性。根据定义,当前状态捕捉了历史中所有相关的信息,所以知道了状态,状态是未来的充分统计。某阶段的状态一旦确定,则此后过程的演变不再受此前各状态及决策的影响,历史 (history) 就可以完全丢弃。也就是说,未来与过去无关。举个不恰当的例子:A股某些医疗股的变化指数。。。
然而在实际的环境中,智能体所需完成的任务不能够完全满足马尔科夫性质,即在时间步
1.1 Markov Chain.
Probability of outcome of state X depends on the state of the previous n outcomes.
1.2 Markov Chain of First-Order
Value or the state of random variable
Markov Chain in NLP
- Unigram Model: Each word is independent
- Bigram Model (First-order MC)
- Trigram Model (Second-order MC)
• Current word depends on previous two words
2. 马尔科夫过程(Markov Process)
是一个无记忆的随机过程,可有用元组
为有限的状态空间集, 表示时间步 的状态,其中 。 为状态转移矩阵,
状态与状态之间的转换过程即为马尔科夫过程。虽然我们可能不知道P的具体值到底是什么,但是通常我们假设P是存在的(转移概率存在,如果是确定的,无非就是概率为1),而且是稳定的(意思是从状态A到其他状态的转移虽然符合某个分布,但是其转移到某个状态的概率是确定的,不随时间变化的)。
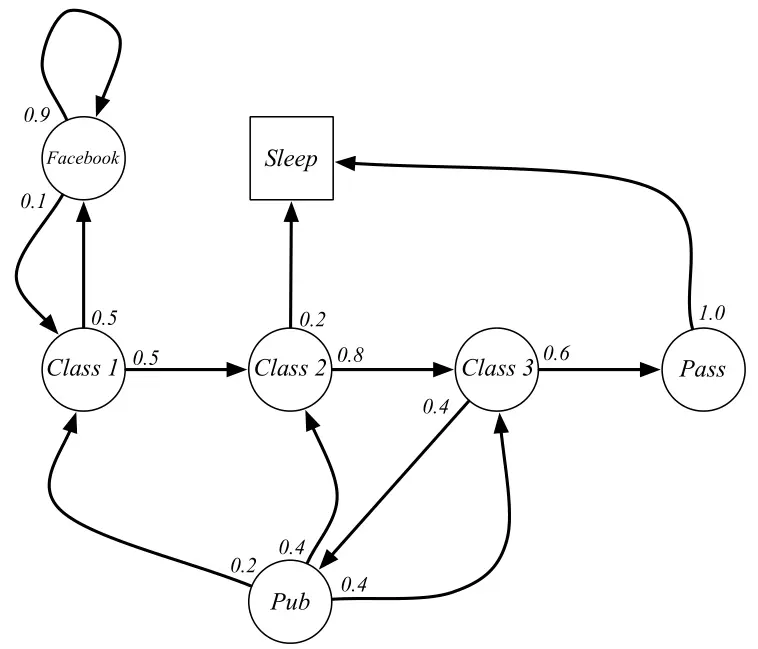
上图中,圆圈表示学生所处的状态,方格Sleep是一个终止状态,终止状态也可以理解成以100%的概率转移到自己,所以一旦进入,就停留在此。箭头表示状态之间的转移,箭头上的数字表示状态转移概率。
例如,当学生处在第一节课(Class1)时,有50%的概率会上第2节课(Class2);同时也有50%的概率不认真听课,进入到刷facebook这个状态中。在刷facebook这个状态时,比较容易沉迷,有90%的概率在下一时刻继续浏览,有10%的概率返回到第一节课。当学生进入到第二节课(Class2)时,会有80%的概率继续参加第三节课(Class3),有20%的概率觉得课程较难而被迫下课(Sleep)。当学生处于第三节课这个状态时,有60%的概率通过考试,继而100%的结课,也有40%的概率去泡吧。泡吧之后,又分别有20%、40%、40%的概率返回值第一、二、三节课重新继续学习。
假设学生马尔科夫链从状态Class1开始,最终结束于Sleep。其间的过程根据状态转化图可以有很多种可能性,这些都称为采样片段Sample Episodes。以下四个Episodes都是可能的:
1 | C1 - C2 - C3 - Pass - Sleep |
2.1 马尔科夫链与Episode
Episode可以翻译为片段、情节、回合等,在强化学习问题中,一个Episode就是一个马尔科夫链,根据状态转移矩阵可以得到许多不同的episode,也就是多个马尔科夫链。
强化学习问题分两种:
- 如果一个任务总能达到终态,结束任务或者开启下一轮任务,那么这个任务就被称为回合任务,也就是episode任务。例如,让一个智能体学习如何下围棋,围棋棋盘只有那么大,游戏定会终局,所以是一个回合式任务。
- 如果一个任务可以无限持续下去,永远不会结束,即永远在训练当中,那么这个任务就被称为连续性任务。例如,教会一辆车能够进行自动驾驶就是一个连续性任务,不要钻牛角尖说能源会耗尽,车子会磨损,我们只聚焦问题与环境本身,不涉及其他非稳定因素。
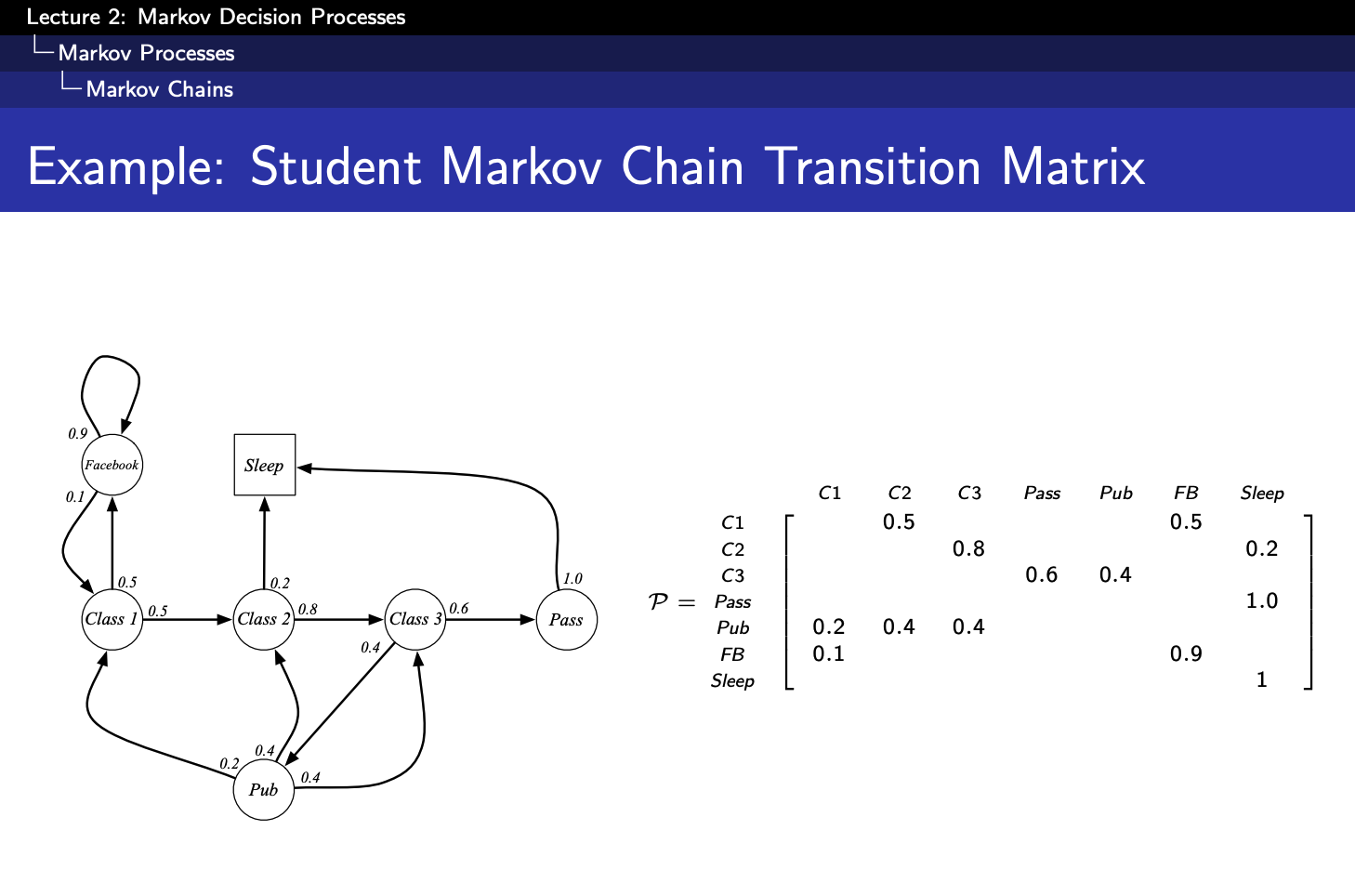
3. 状态转移矩阵(State Transition Matrix)
对于马尔科夫状态
Markdown版本:
4.马尔科夫奖励过程(Markov Reward Process)
原本的马尔科夫过程加上奖励值R之后就变成了马尔科夫奖励过程,元素由
马尔科夫奖励过程(Markov Reward Process)定义:
一个马尔科夫奖励过程(MRP),由一个四元组构成:
- S为有限的状态空间集,
表示时间步 的状态,其中 。 为状态转移矩阵, - R为奖励函数,
为折扣因子,
为了找到长期累积奖励,不仅要考虑当前时间步t的奖励,还需要考虑到未来的奖励。总奖励(Total Reward)
根据总奖励R的计算公式可知,长期累积奖励从当前时间步
一般而言,环境是随机的或者未知的,这意味着下一个状态可能也是随机的。即由于所处的环境是随机的,所以无法确定下一次执行相同的动作,以及是否能够获得相同的奖励。向未来探索得越多,可能产生的分歧(不确定性)就越多。因此,在实际任务中,通常用折扣未来累积奖励(Discounted Future Cumulative Reward)
如果考虑到无限时间的场景,更加通用的表示为(当前获得的奖励表示为
其中
- 当γ=0时,状态S的值完全由其转移的期望立即奖励表示,即一点都不关心未来,可以认为该策略“目光短浅”。
- 当γ=1时,状态S的值由以当前状态为始态,运行至终态所得到的所有立即奖励加和的值表示,即未来与现在同等重要,看起来就像非常“有远见“。
- 当0<γ<1时,状态S的值是前两个模式的trade-off,即对未来看重的程度由γ决定。倘若想平衡当前时间的奖励与未来的奖励,可设置
为一个较大的值,比如 。如果环境是恒定的,或者说环境的所有状态是已知(Model-based),那么未来累积奖励可以提前获得并不需要进行折扣计算,这时候可以简单的将折扣因子 设置为1。
4.2 回报(Return)与折扣因子
大多数的马尔科夫奖励过程(MRP)与马尔科夫决策过程(MDP)都会使用折扣因子
- 数学上计算的便利性。在带环的马尔可夫过程中,可以避免陷入无限循环来的无限大回报,达到收敛。
- 随着时间的推移,,未来的不确定性越来越大
- 类比经济学中,眼前的利益比未来的利益更加有意义
- 人类的行为也更加倾向于眼前利益
- 退一步来说,令
为1,也可以简单的转化成没有折扣因子的状态
4.3. 价值函数(Value Function)
价值函数是状态
在概率论和统计学中,数学期望是试验中每次可能的结果的概率乘以结果值得总和。这里回报的期望,即价值函数会会随着折扣因子的变化而取不同的值,因为回报会因为
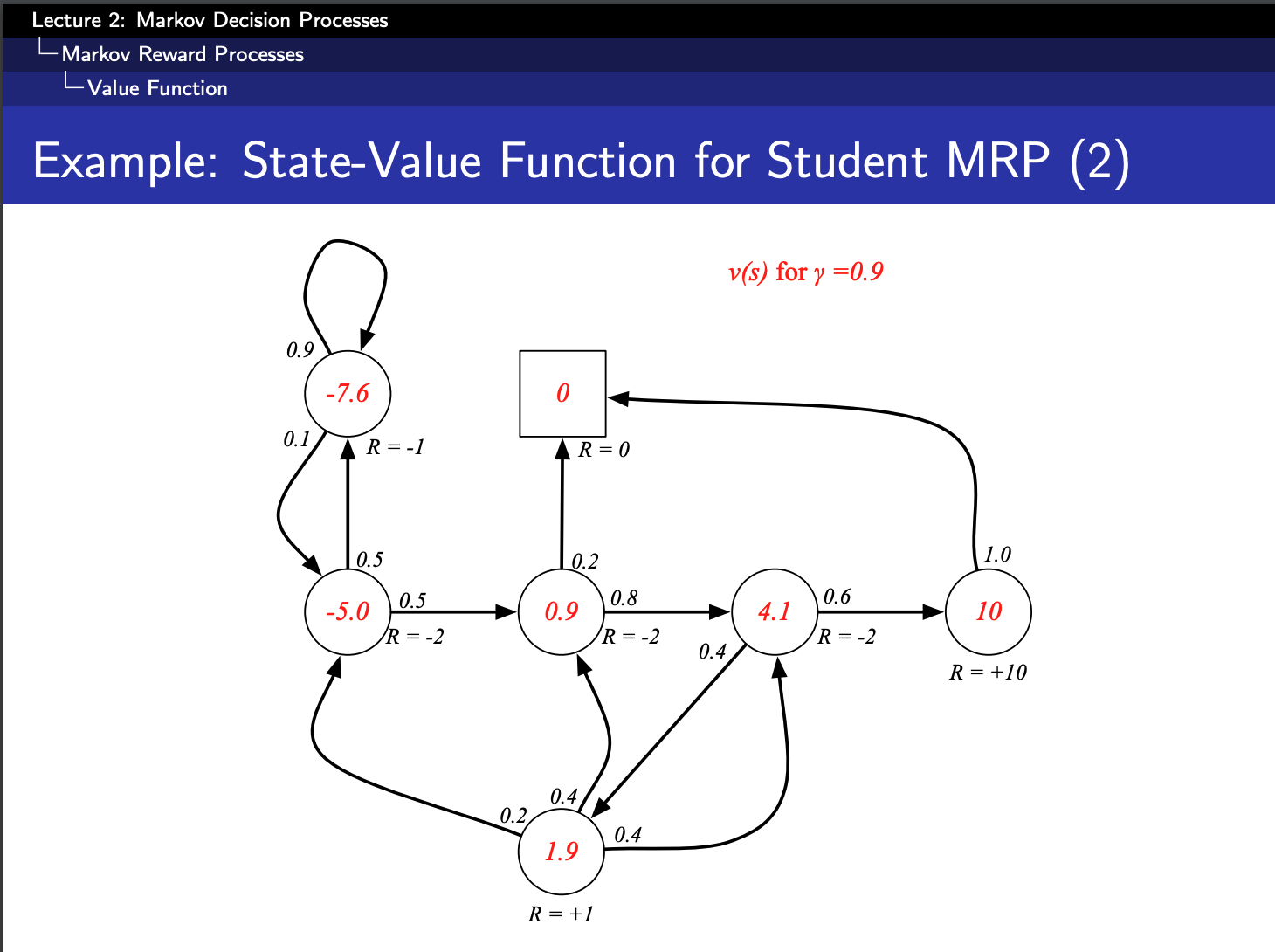
上图是
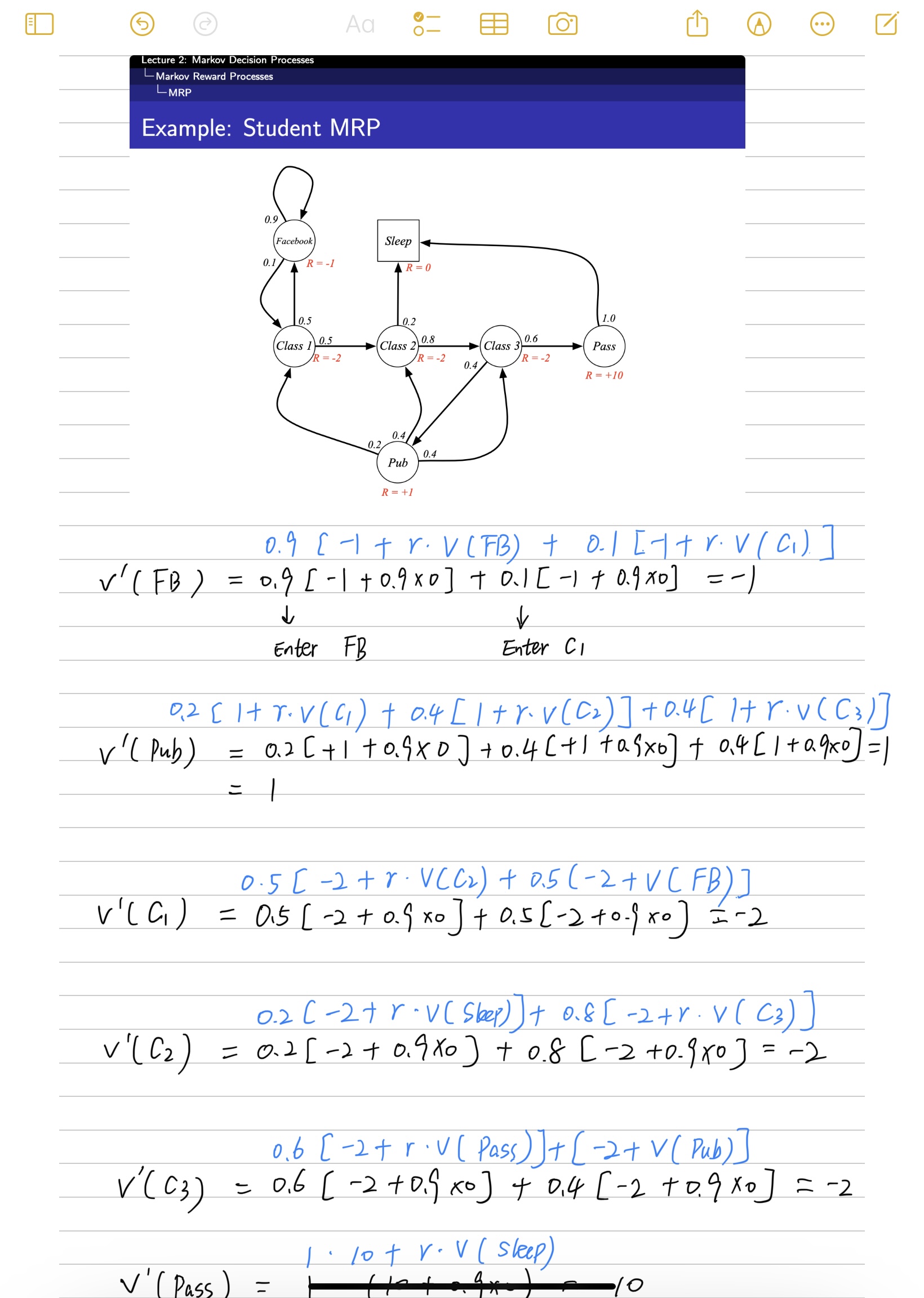
通过价值函数的公式我们可以知道,要想求解一个状态的状态价值, 需要根据马尔科夫链把所有的可能列出来。每个可能都在终点终止,但是上面这个马尔科夫过程其实是有环的, 可能陷入无限循环的局面。
因为折扣因子还是1,所以会导致回报G无限大,期望也就无限大,状态价值V也就无限大。下一章节引入贝尔曼方程就是为了更好的求解价值函数的。
以下是python代码:
1 | //initialization |
About this Post
This post is written by Rui Xu, licensed under CC BY-NC 4.0.